CW32L012“哈基汪”开发套件快速上手指南(附资料)
一、哈基汪介绍
CW32L012哈基汪是一款基于CW32L012C8T6的小型机器人控制板的智能小车。CW32L012C8是武汉芯源半导体有限公司的一款高性能、超低功耗的32位处理器,96M主频,64K FLASH, 8K RAM,工作温度范围为-40度至85度。
CW32L012哈基汪功能丰富:
语音智能操控:可以通过说前进、后退、左转、右转、加速、减速、摇尾巴等与小车进行人机交互;
蓝牙遥控:手机app连接蓝牙远程控制小车;
红外遥控:可以通过小型红外遥控器远程遥控小车;
超声波自动避障:运动中的小车会自动识别障碍物,进行避开,防止碰撞损伤小车;
小车和四足机器人形态自动切换,秒变摇尾巴哈基汪
资源参考图
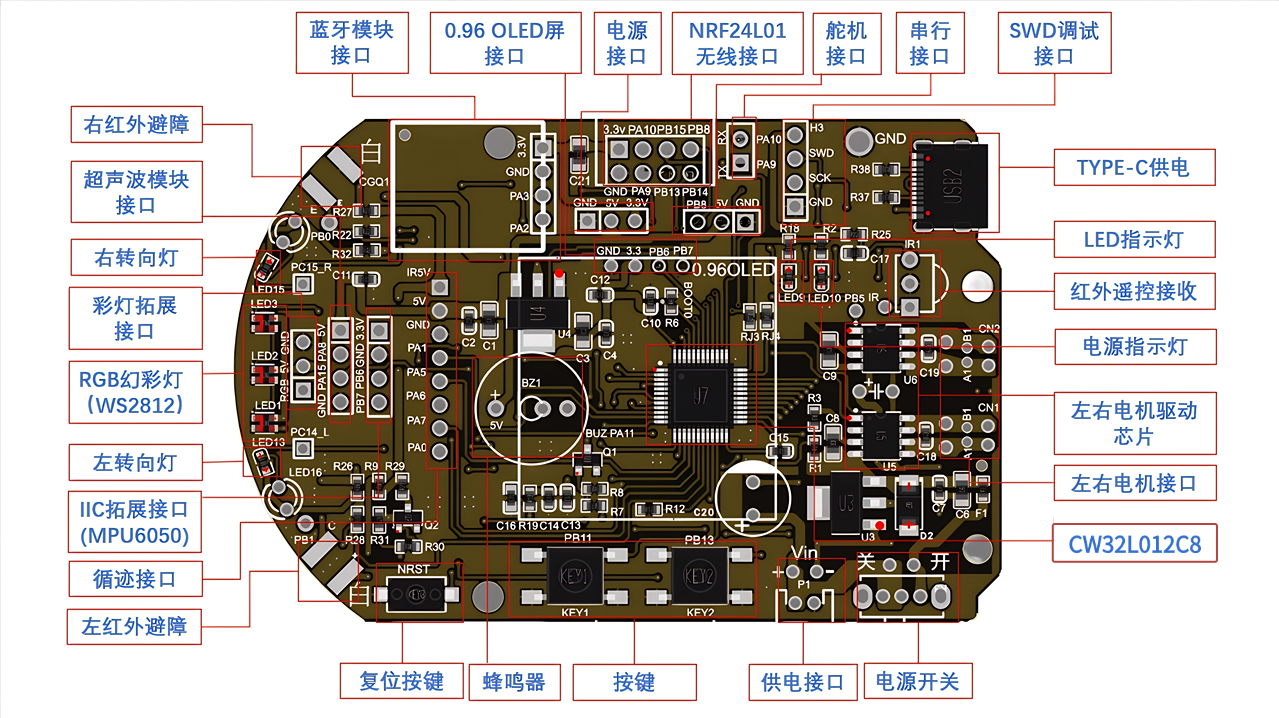
实物图
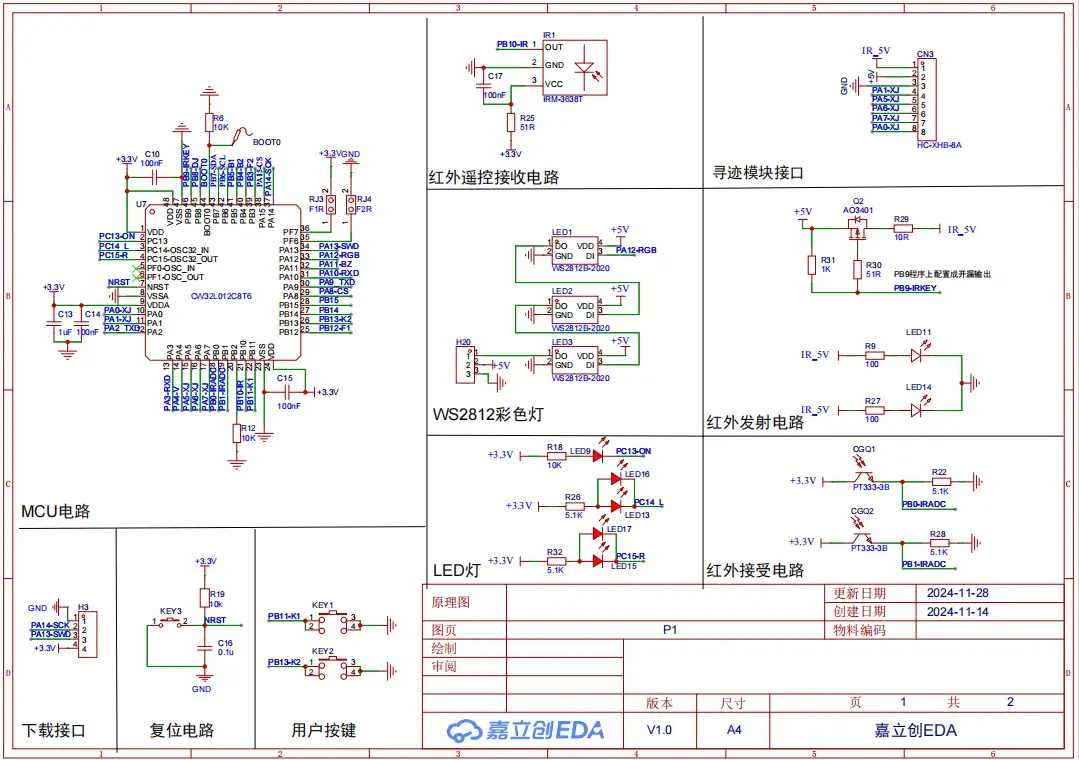
二、原理图
三、资料链接
飞书资料链接:
https://dwi41yhz703.feishu.cn/wiki/B1Ihw31ebiX0vkkhQr2cINnkn1g?from=from_copylink

四、使用文档
蓝牙遥控功能手机APP蓝牙调试器设置
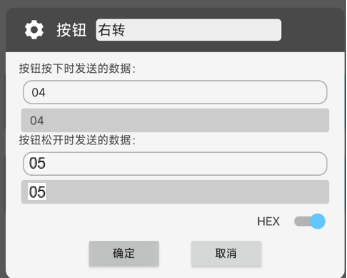
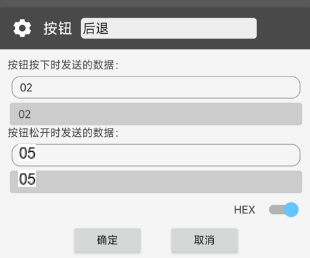
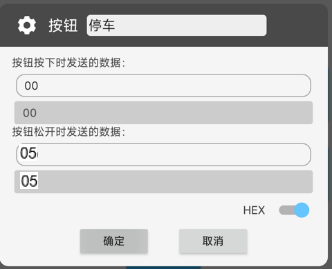
按钮:速度1~6对应小车的六档速度,前进后退左右转停车对应小车的状态;
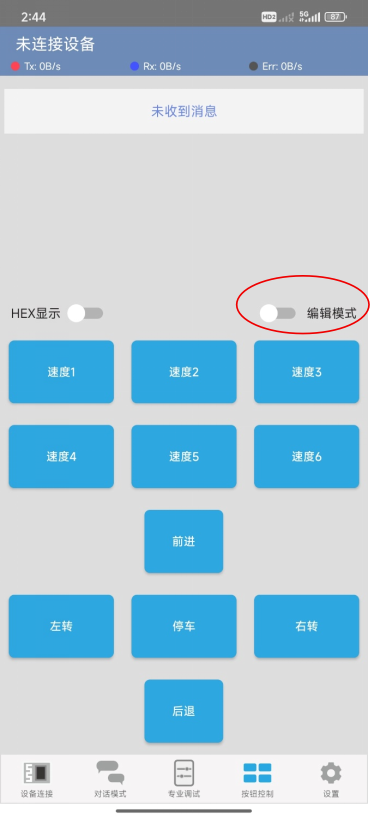
如图,未勾选编辑模式,此时处于遥控状态;若要编辑按钮,请将此选项勾选上。
各按钮配置如下(勾选编辑模式开始编辑按钮,编辑按钮时要勾选HEX):
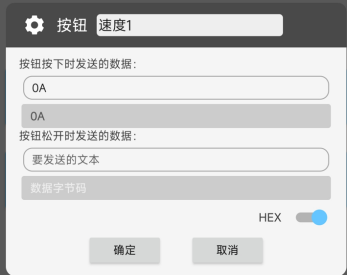


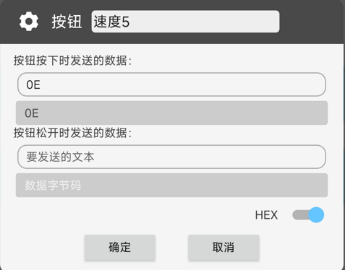



若要按下前进按钮,小车前进,松手后自动停止,如上图所示编辑即可。
若要按下前进按钮,小车前进,松手后保持前进,请将“按钮松开手发送数据:”这一栏的“05”删除即可
(前进,后退,左转,右转四个按钮同理)
连接蓝牙步骤:
打开手机蓝牙,给小车上电,进入蓝牙调试器APP如下界面:
点击“XLBLE”右边的“+”进行连接

未连接界面
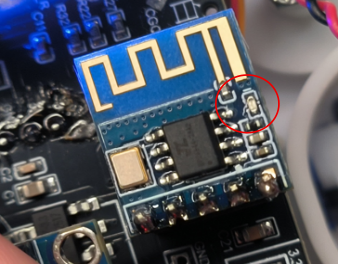
未连接时蓝牙模块状态

成功连接界面
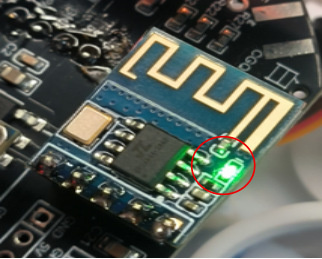
成功连接时蓝牙模块状态
红外遥控功能指令集
避障功能介绍和注意事项
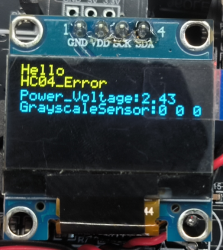
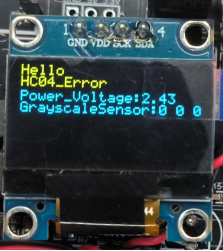
使用前请检测超声波是否正常工作:若OLED显示HC04_Error(超声波异常,接触不良或是电压不足或是超出最大测量距离) Distance(超声波正常工作,显示前方障碍物的的距离,单位cm)

超声波异常图 、

超声波正常图
功能介绍:小车在前进的状态下,会检测前方障碍物的距离,若小于10cm,小车会自动进行左/右转(1s)进行避障,然后继续前进。
语音模块指令集和接线


接线:
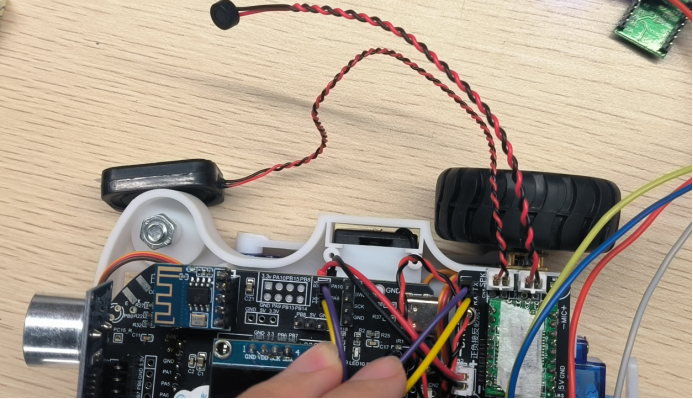
语音和主板的串口通信线(黄色和紫色):主板RX接语音扩展版TX,主板TX接语音扩展版RX
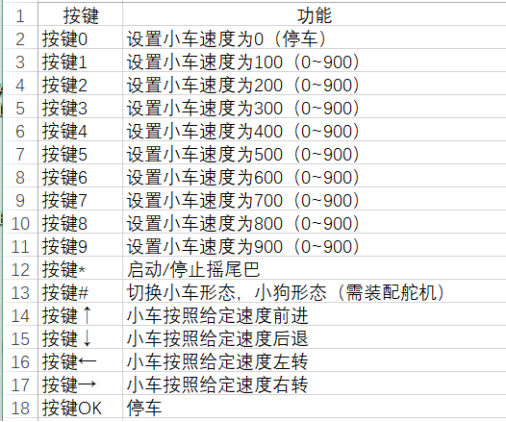
按键指令集
基础版程序(工程名basic_car_cw32L012):KEY1按键按下小车停车,KEY2按键按下小车前进
升级版程序(工程名pro_car_cw32L012):KEY1按键按下小车前进/停止,KEY2按键按下小车变换形态(小车/四足)
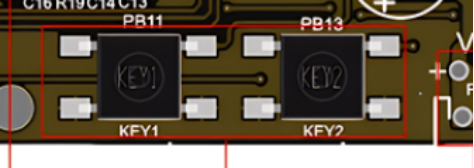
KEY1(左)KEY2(右)
OLED介绍
第二行:HC04_Error(超声波异常,接触不良或是电压不足或是超出最大测量距离)
Distance(超声波正常工作,显示前方障碍物的的距离,单位cm)
第三行:电池电压(单位V)
第四行(基础版程序才有):显示循迹当前状态;对应灰度传感器左中右(1表示压线 0则未压线)
超声波异常图
超声波正常图
循迹状态图
循迹功能(基础版本上扩展)
使用说明:程序会在上电的时候记录小车所在地图的位置并记录下地图数据,后续灰度传感器检测到与上电时所处的地图颜色差异过大时便会判定为扫到线,并执行循迹逻辑。
若在白色地图上进行循黑线跑,则需要先在地图的白色位置上电(或者按一下复位),然后便可操控小车进行运动,小车在前进的过程中若是检测到线,便会自动执行循迹逻辑,若是未扫到线,则正常按照给出的指令进行运动。
灵敏度:若是地图颜色变化过小或者地图颜色原因导致循迹状态一直不理想,可以更改main.c最上方的循迹阈值变量Threshold。

OLED会显示循迹状态,可以直观看到灰度传感器状态:显示循迹当前状态对应左 中 右(1表示压线 0则未压线)
循迹状态图(第四行)
四足形态(基础版本上扩展)
注意事项:下载好对应程序后上电后默认四个脚都处于收拢状态(如下图),请给小车通电并且舵机正常接线后再按照下图所示给舵机安装塑料卡尺(机器人的脚部分)
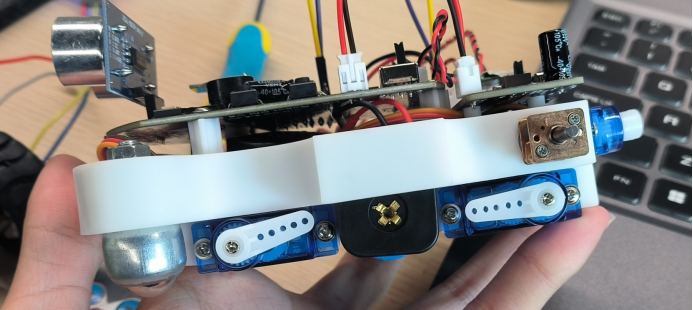
脚部初始上电状态图(另一侧同理)
功能:在小车行进的途中可以随时切换小车/四足状态(红外遥控#键或者按键KEY2),依旧可以通过蓝牙、红外、语音遥控,与小车状态的功能一致
- NVIDIA Vera大规模极致单线程CPU如何为运行智能体循环而生
- 云知声U2-ASR与U2-TTS模型多语种能力全面升级
- 隔离放大器:赋能现代科技产品精准稳定运行的核心信号器件
- 电机烧损、线路漏电、无故停机?这款智能电动机保护器筑牢工业电气安全防线
- 三菱PLC物联网网关的应用案例解析
- 家具板材自动化生产设备数据采集解决方案
- 楼宇自控系统无线组网方案:捷米特 JM-RS-WIFI 数传模块楼宇 BA 空调、温控机组无线采集实施案例
- 全产业链协同提速!2026机器人市场迭代进入“实用主义”周期
- 【场景案例】阿普奇低功耗多串口嵌入式工控机E5M在轨道交通中的解决方案
- DeviceNet转EtherCAT工业网关TX131助力3C电子SMT无尘产线数据互通
- 车载 T-Box 是什么?Robotaxi 与无人矿卡时代通信网关的技术演进
- 广汽集团旗下如祺数据亮相WAIC 2026世界人工智能大会
- 芯朋微电子重磅亮相第六届中国深圳电机驱动与控制技术及应用论坛
- 2030年规模达250亿美元:RISC-V如何以“芯”引领“中国芯”自主可控?
- Matter协议如何打通设备、品牌与通信协议之间的互通“藩篱”?
- 又一大模型公司发布AI原生手机!跟豆包手机有什么不同?