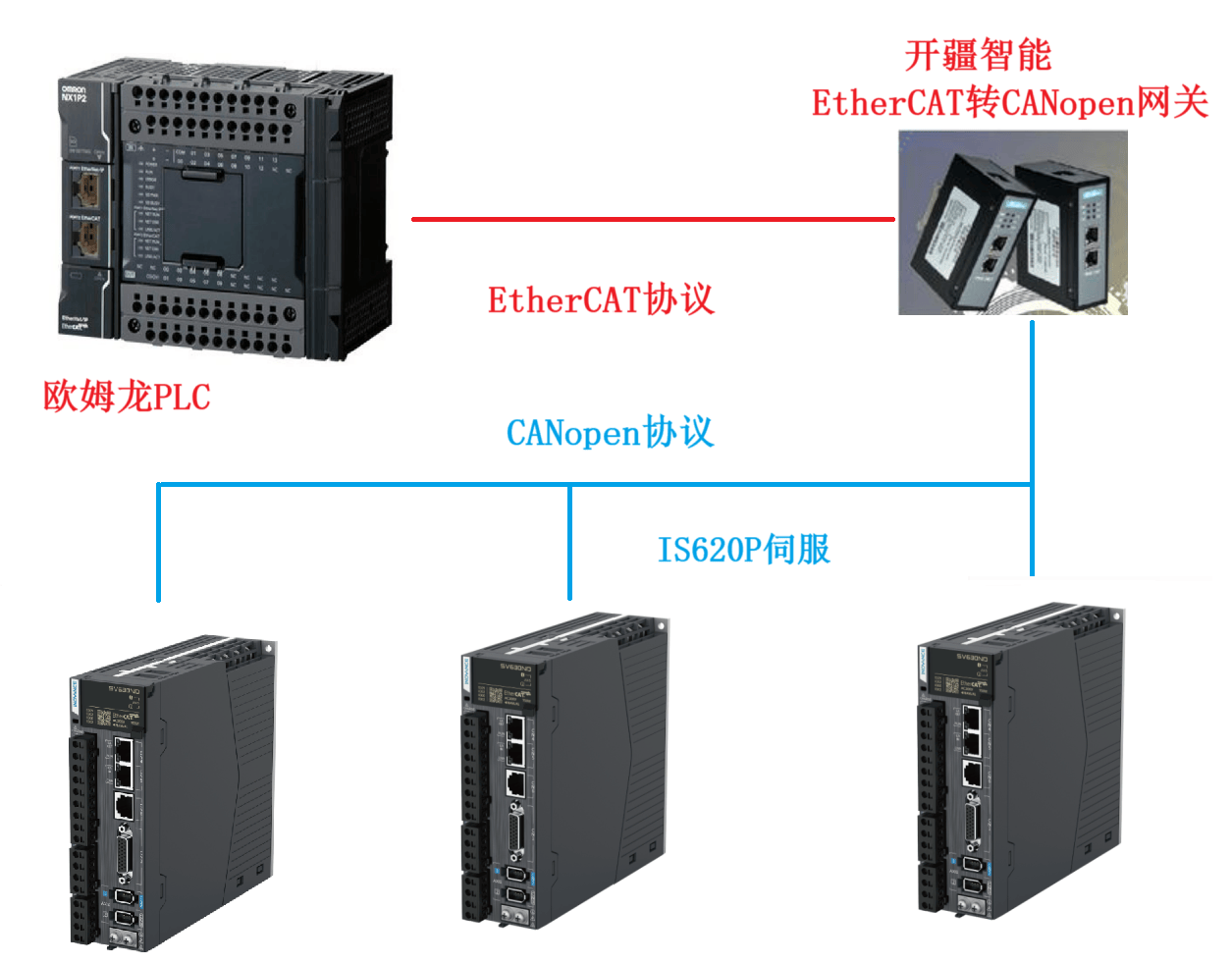
开疆智能EtherCAT转CANopen网关连接IS620P伺服配置案例
本案例是国内某纺织厂使用欧姆龙PLC通过EtherCAT转CANopen连接汇川IS620P伺服驱动器的配置案例。
具体步骤如下。
配置步骤:
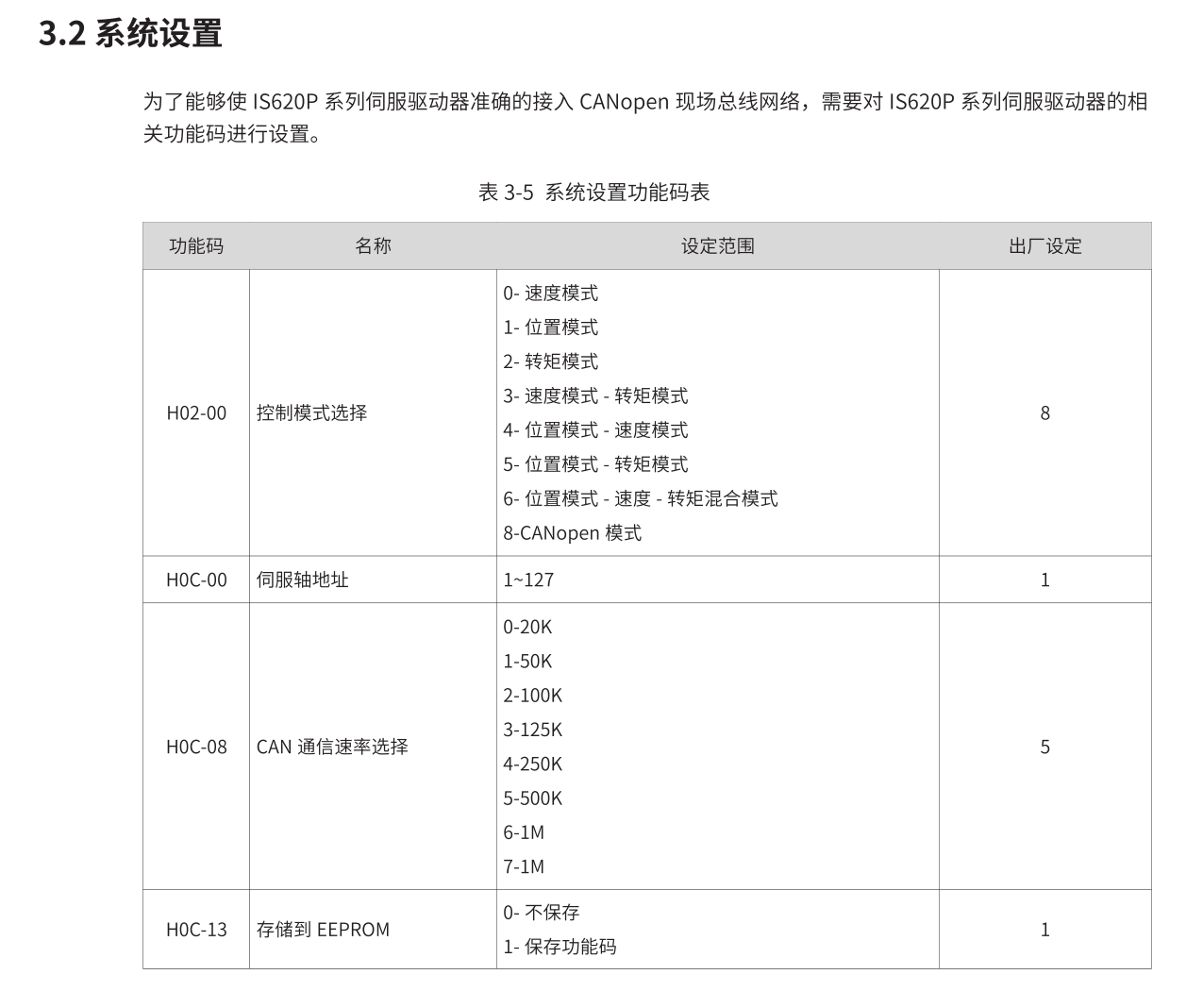
首先配置伺服从站设定从站地址,波特率以及其他相关参数。
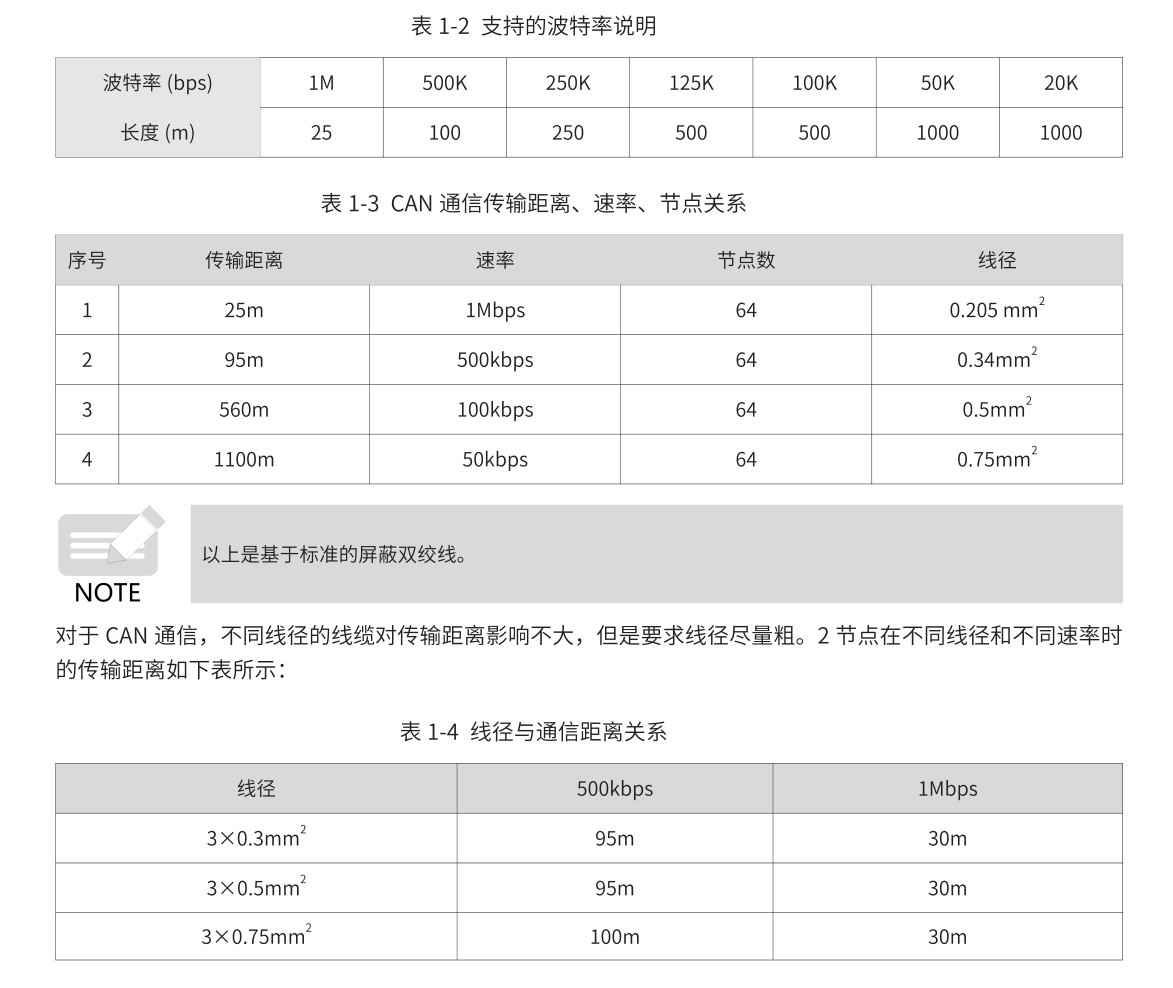
从手册得知波特率支持20k-1M支持4个RTPDO
根据实际通讯距离设置实际波特率
根据从站接线要求接好CAN总线。
面板设置控制模式为8CANopen模式,站地址为1波特率我们设为1M
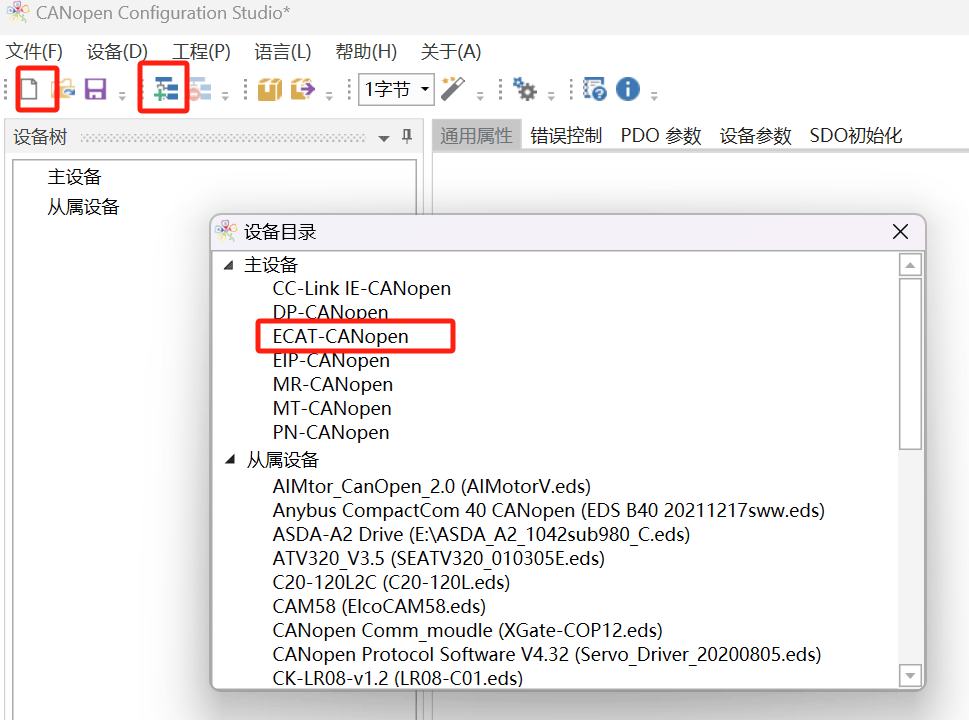
完成后保存配置并重新上电。打开网关配置软件“CANopen Configuration Studio”
网关配置
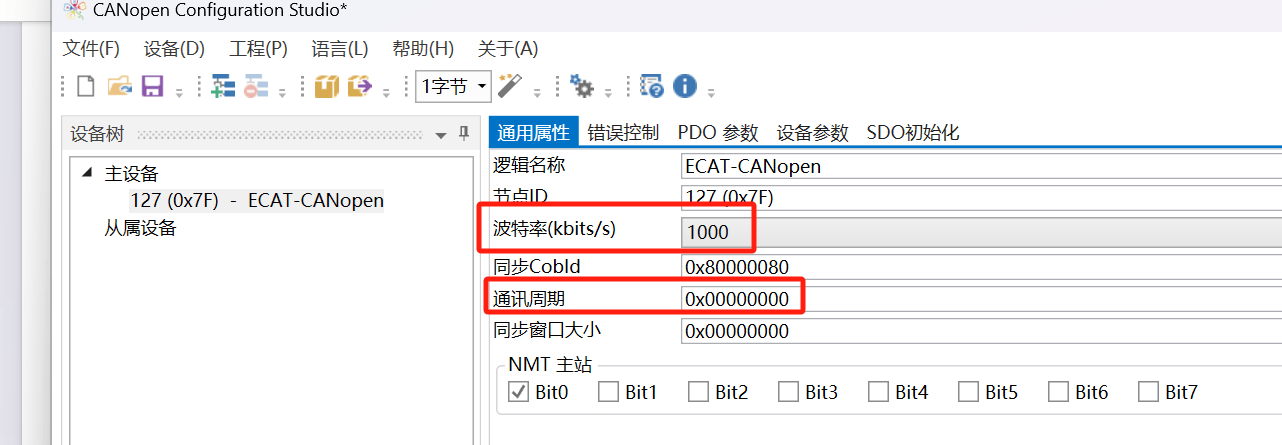
下一步进行网关的配置。打开网关配置软件“CANopen Configuration Studio”新建项目选择“ECAT-CANopen”
设置网关CANopen一侧的波特率以及通讯周期参数,如果不使用周期模式可以填0
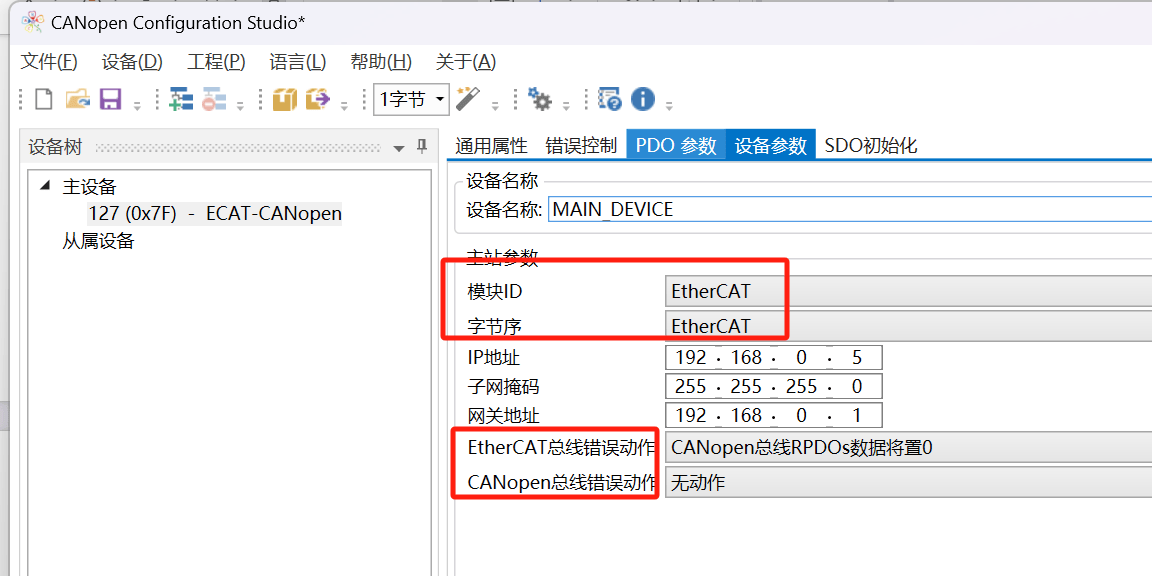
设置网关的字节顺序下载IP地址以及掉线后数据处理方式。
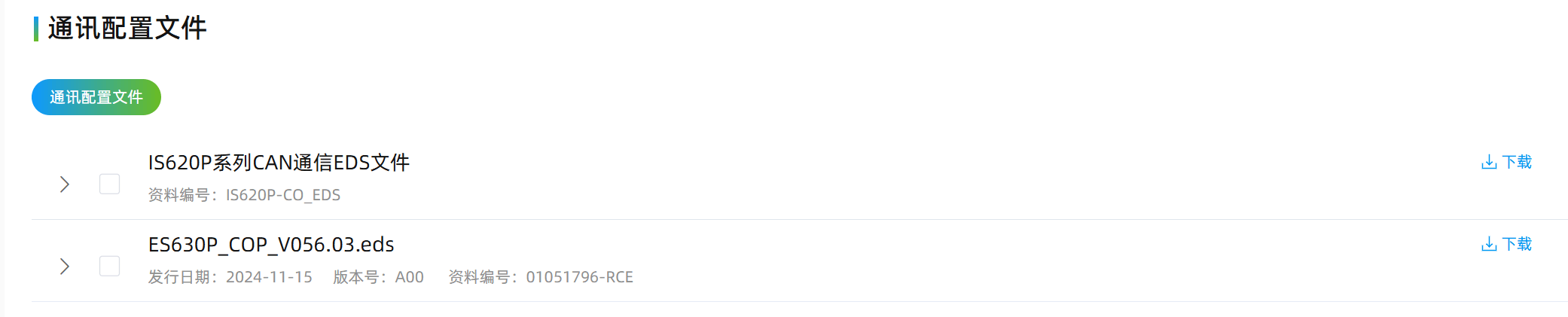
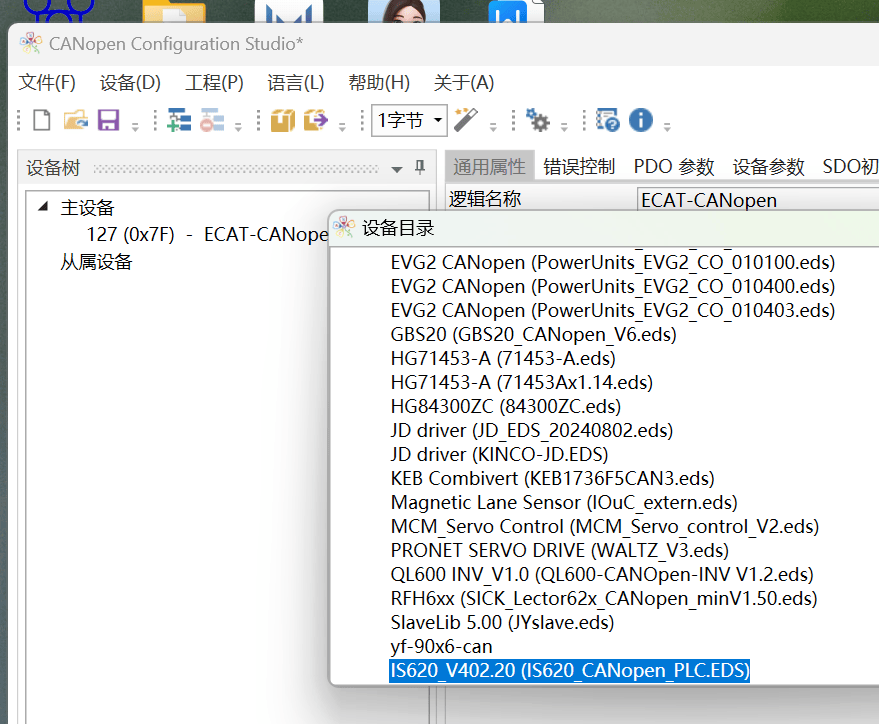
导入从站伺服EDS文件,可从伺服官网下载
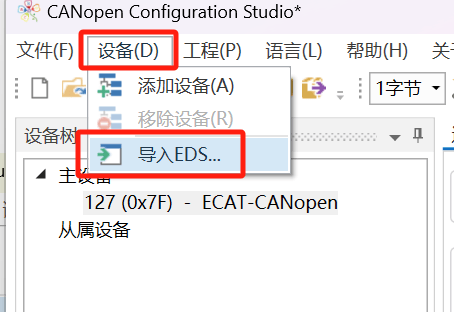
导入后将从站添加进网关组态
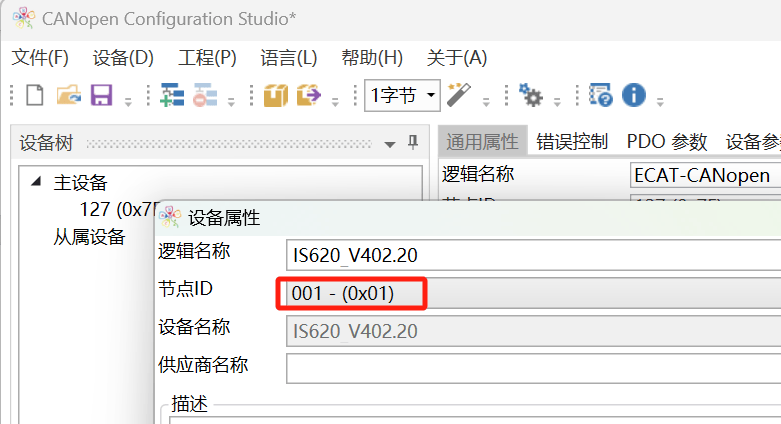
设置好从站地址
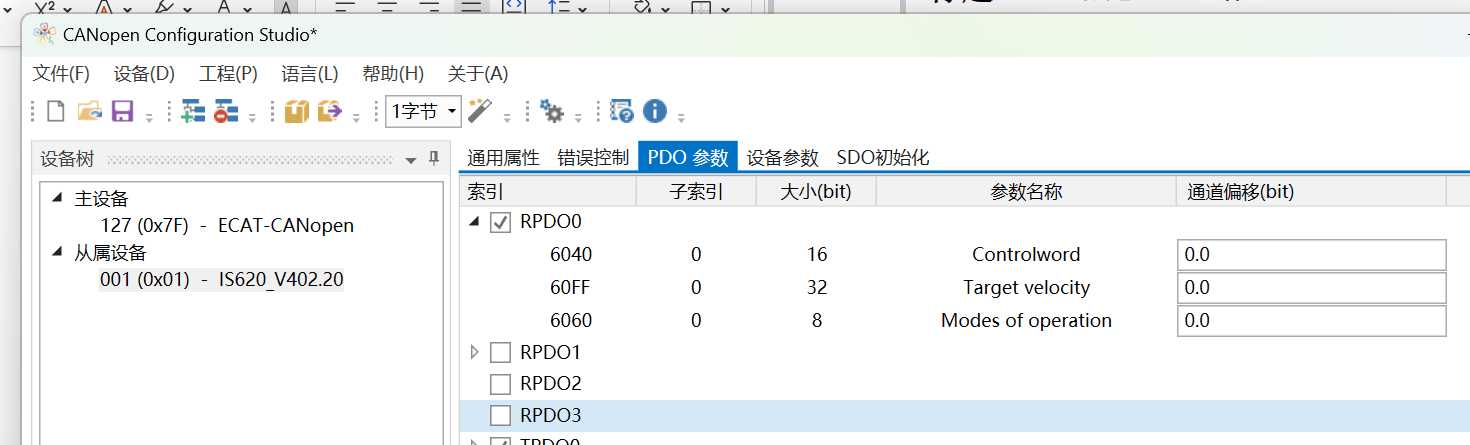
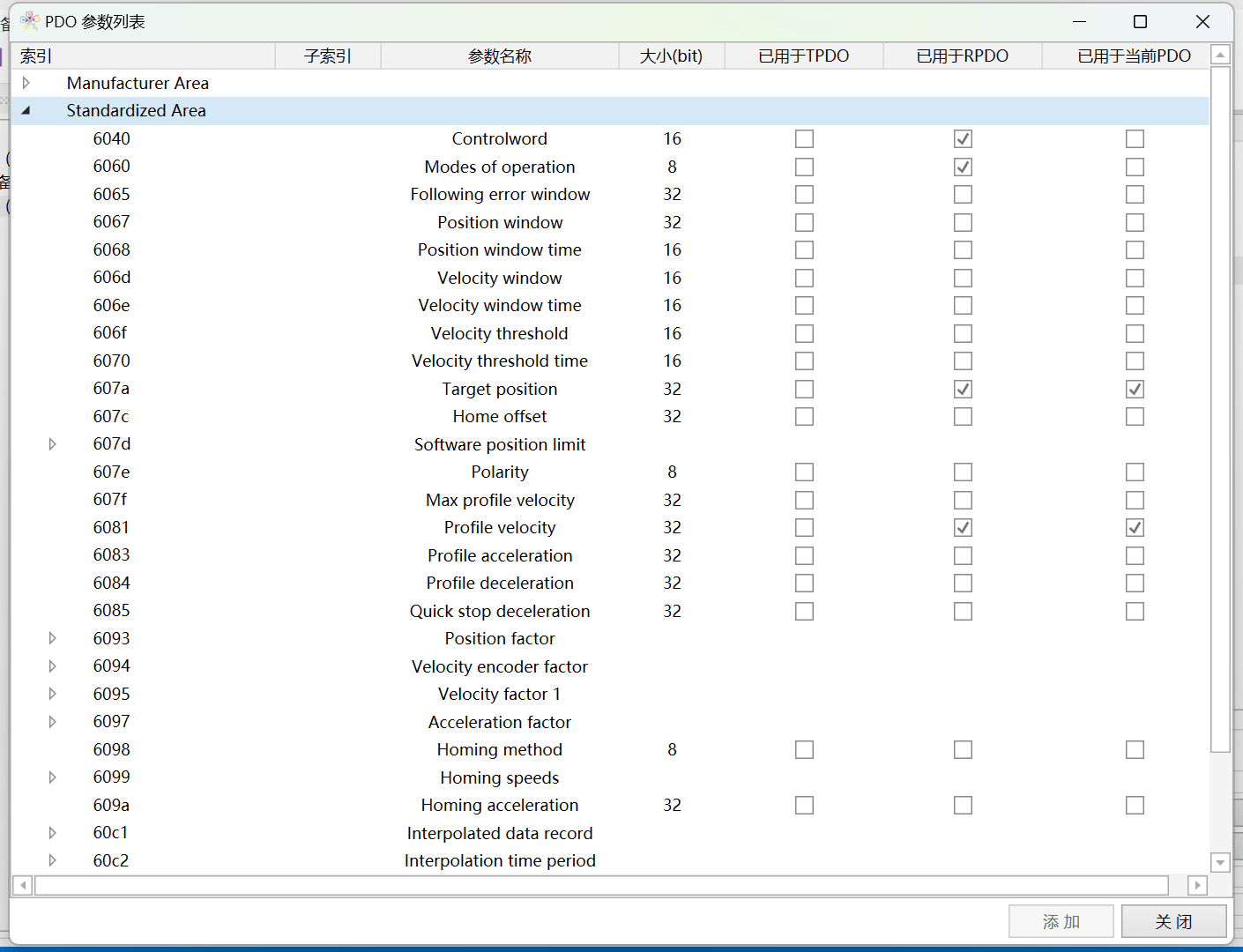
设置每个PDO用到的参数,以及PDO的通讯参数。
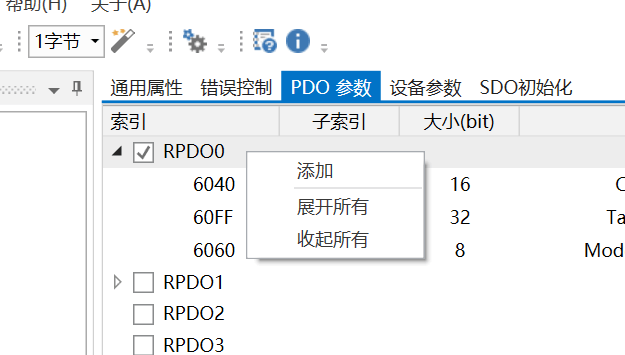
没有的可以右键-添加找到所需要用到的参数即可。
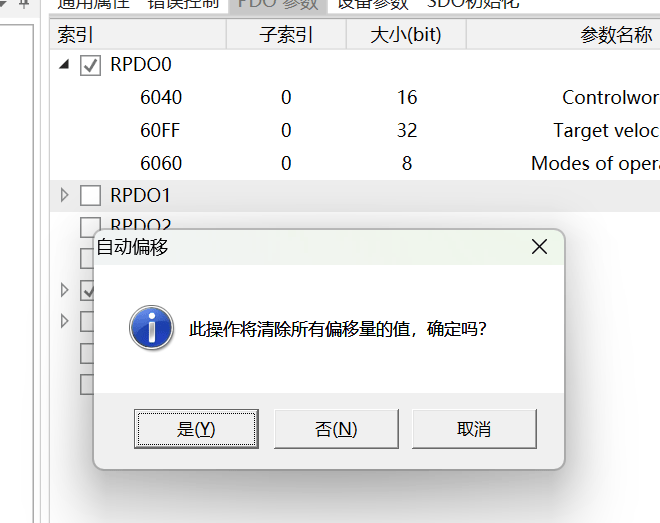
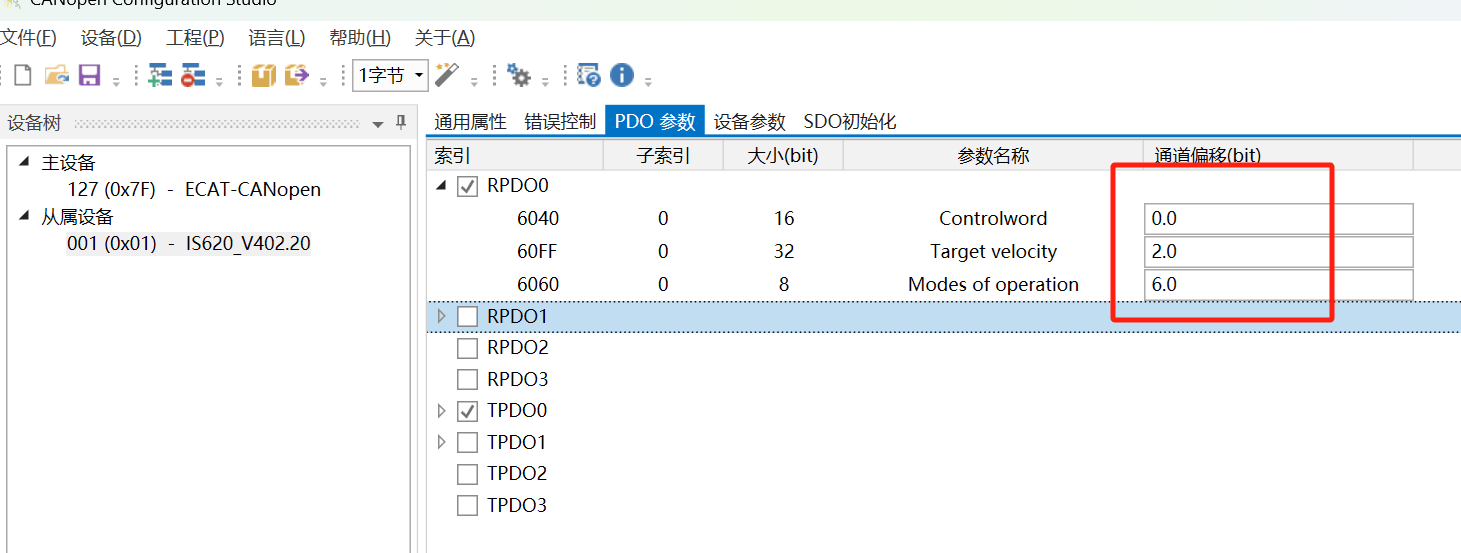
确定参数后点击自动设置通道偏移,以便对应PLC的输入输出点。
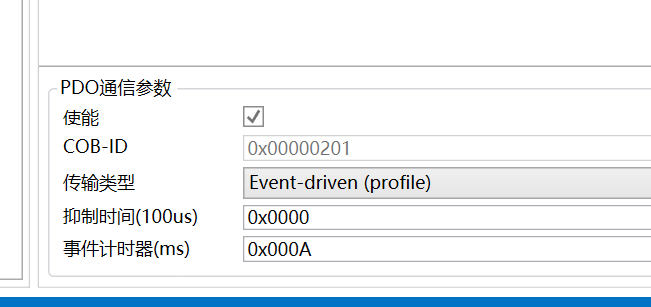
设置好PDO的通讯参数(如传输类型与触发参数等)
确认无误后将配置下载进网关,并进行PLC一侧的EtherCAT设置
欧姆龙PLC配置
1. 打开欧姆龙配置软件Sysmac Studio
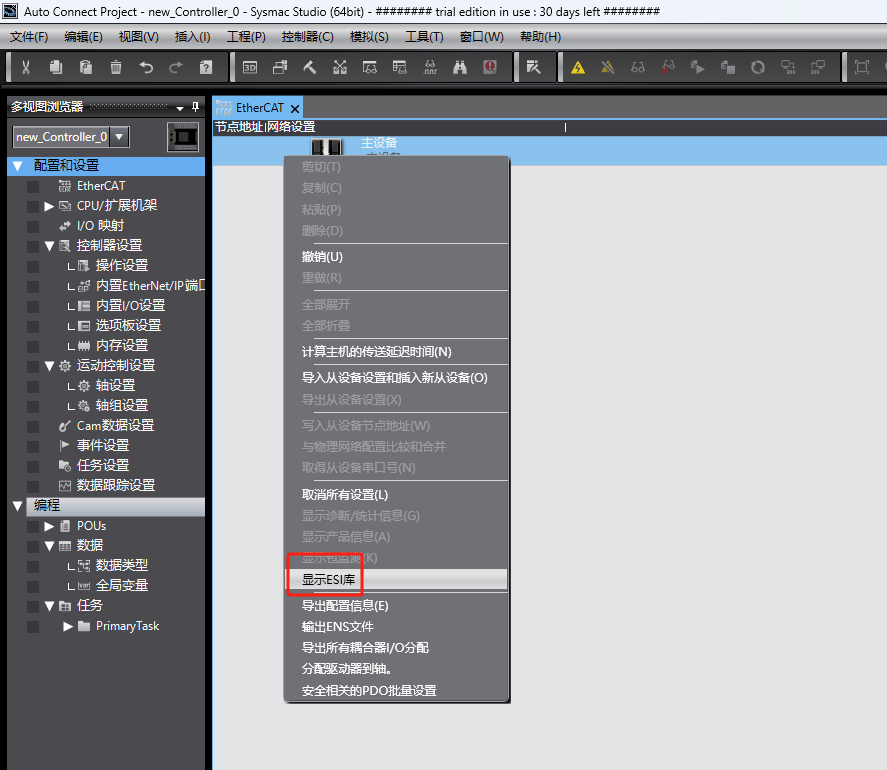
2. 双击EtherCAT,在主设备处右键选择显示ESI库
3. 在弹出的对话框中选择安装文件
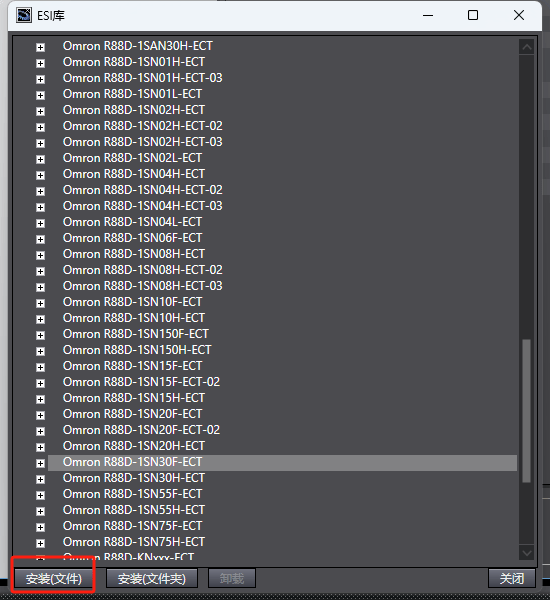
4. 选择网关的ESI文件
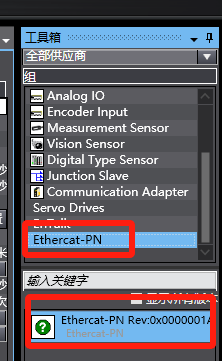
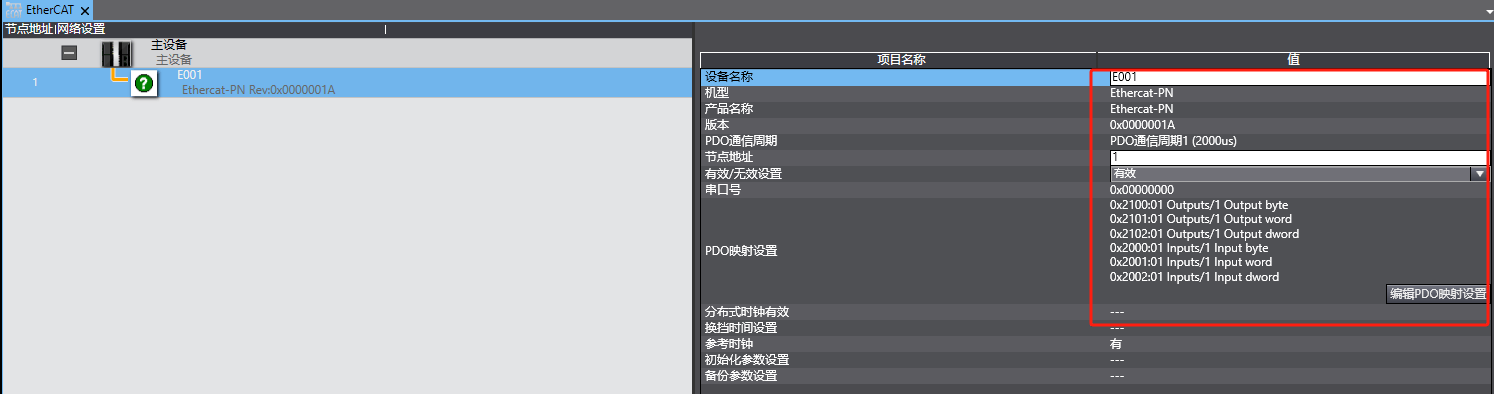
5. 添加完成后选择Ethercat-PN
6. 1设置好网关参数
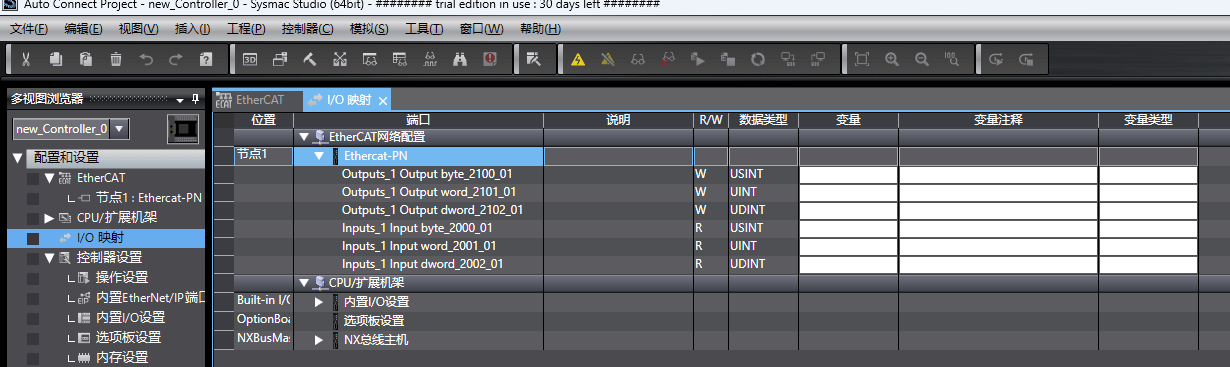
7. 打开IO映射设置好变量
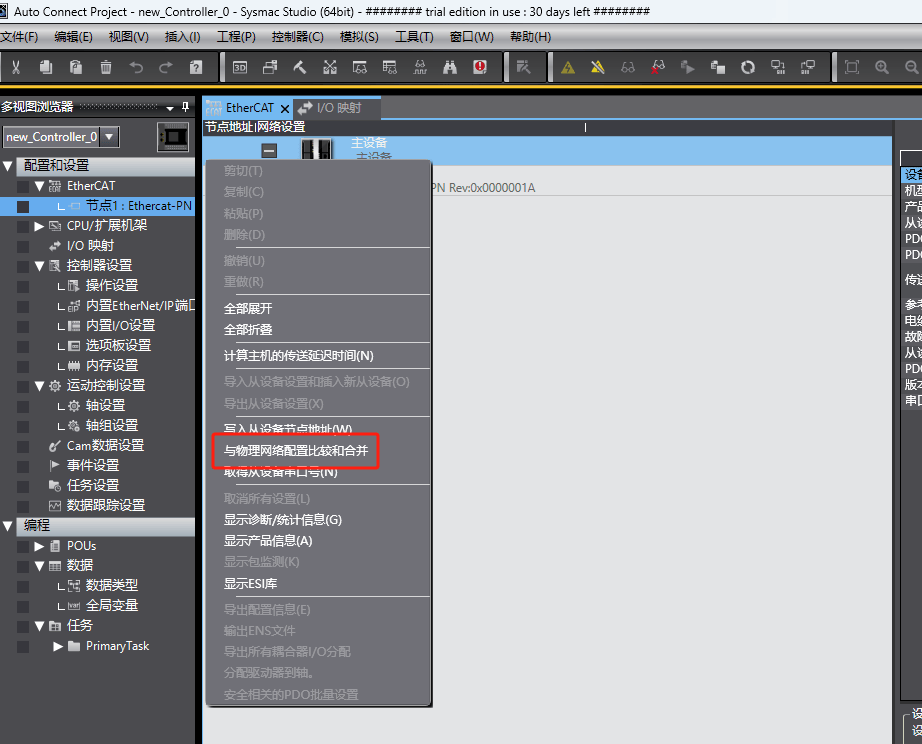
8. 将PLC在线,在主站处右键选择与物理网络配置比较和合并
9. 完成后将组态下载至PLC,将设备上电后观察设备指示灯,等待PLC,网关与从站设备指示灯均正常后即可正常读写从站设备。
审核编辑 黄宇
- NVIDIA Vera大规模极致单线程CPU如何为运行智能体循环而生
- 云知声U2-ASR与U2-TTS模型多语种能力全面升级
- 隔离放大器:赋能现代科技产品精准稳定运行的核心信号器件
- 电机烧损、线路漏电、无故停机?这款智能电动机保护器筑牢工业电气安全防线
- 三菱PLC物联网网关的应用案例解析
- 家具板材自动化生产设备数据采集解决方案
- 楼宇自控系统无线组网方案:捷米特 JM-RS-WIFI 数传模块楼宇 BA 空调、温控机组无线采集实施案例
- 全产业链协同提速!2026机器人市场迭代进入“实用主义”周期
- 【场景案例】阿普奇低功耗多串口嵌入式工控机E5M在轨道交通中的解决方案
- DeviceNet转EtherCAT工业网关TX131助力3C电子SMT无尘产线数据互通
- 车载 T-Box 是什么?Robotaxi 与无人矿卡时代通信网关的技术演进
- 广汽集团旗下如祺数据亮相WAIC 2026世界人工智能大会
- 芯朋微电子重磅亮相第六届中国深圳电机驱动与控制技术及应用论坛
- 2030年规模达250亿美元:RISC-V如何以“芯”引领“中国芯”自主可控?
- Matter协议如何打通设备、品牌与通信协议之间的互通“藩篱”?
- 又一大模型公司发布AI原生手机!跟豆包手机有什么不同?